IEEE P21451-1 Smart Sensor Network
Brian Finch, Eric Guidarelli, Keith Hall, Jacob Harris, Anas Muhamed, Matt Oldland, Nick Parisi, Tom Stoudt
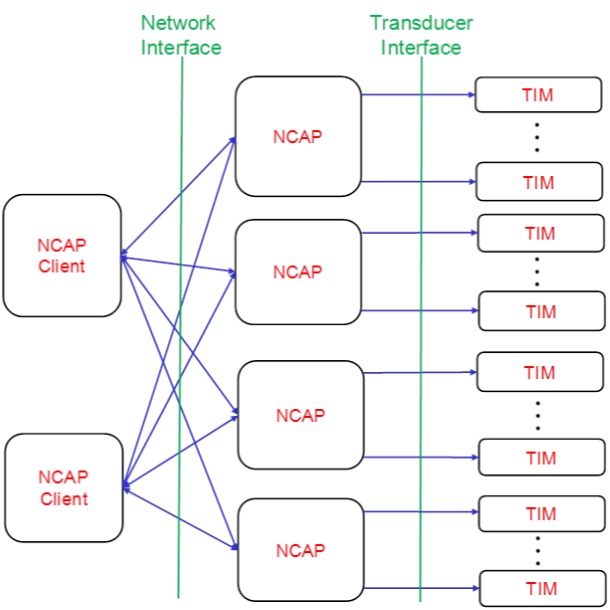
The P21451-1 Standard defines a set of common network communication protocols for IEEE 1451 smart transducers and has five main services that are illustrated in the table below: Identification, Transducers Access, Transducer Electronic Data Sheet (TEDS) Access Services, Event Notification, and Transducer Management Services. The network also identifies protocols and performs other services. The basis of the standard defines the communication between clients, servers, and transducer interface modules (TIMs). The primary communication method used in this project were XMPP (Extensible Messaging Presence Protocol) for communication between the NCAP Client and NCAP Server, and UART (Universal Asynchronous Receiver/ Transmitter) for communication between the NCAP Server and the TIM. Previously, UDP communication was used for as the basis for all communication between the nodes of the network, however, this communication method was slower and required all the nodes to be connected on the same router of a local network. Using XMPP, the nodes of the network do not have to be connected to the same network as each other as the nodes are connected onto the internet
The process in which the client, servers, and TIMs discover and establish communication between each other.
def Server_init
NCAPServerRegister()
def Server_down
NCAPServerUnRegister()
def Server_main
msg = Parse(rawmsg,',', ';')
if msg[0] == '713'
NCAPServerDisocery()
elif msg[0] == '714'
NCAPTIMDiscovery()
elif msg[0] == '715'
NCAPTransducerDiscovery()
elif msg[0] == '716'
NCAPClientJoin()
elif msg[0] == '717'
NCAPClientUnJoin()
def NCAPServerRegister
msg = '711,' + ServerID + ',' + ServerName + ',' + ServerIP
xmpp_send(ClientIDGroup, msg,type = 'All')
def NCAPServerUnRegister
msg = '712,' + ServerID
xmpp_send(ClientIDGroup, msg,type = 'All')
def NCAPServerDiscovery(msg)
msg[1] == ClientID
reply = '0,' + ServerID
xmpp_send(ClientID,reply)
def NCAPTIMDiscovery(msg) if msg[1] == ClientID reply = '0,' + NumTIM + ',' + TIMID xmpp_send(ClientID,reply) else reply = '1' xmpp_send(ClientID,reply)
The process in which data is read from the transducer and conveyed to the client from the server.
int ServerID = '1';
def Server_main
msg = Parse(rawmsg,',', ';')
if msg[0] == '721'
ReadTransducerSampleDataFromAChannelofTIM()
elif msg[0] == '722'
ReadTransducerBlockDataFromAChannelofTIM()
elif msg[0] == '723'
ReadTransducerSampleDataFromMultipleChannelsofTIM()
elif msg[0] == '724'
ReadTransducerBlockDataFromMultipleChannelsofTIM()
elif msg[0] == '725'
ReadTransducerSampleDataFromMultipleChannelsofMultipleTIM()
elif msg[0] == '726'
ReadTransducerBlockDataFromMultipleChannelsofMultiplesTIM()
elif msg[0] == '727'
WriteTransducerSampleDataFromMultipleChannelsofTIM()
# Reading Transducer sample data from a single channel of single TIM
def ReadTransducerSampleDataFromAChannelofTIM(msg)
if msg[1] == ServerID
TIMID = msg[2]
ChannelID = msg[3]
Timeout = msg[4]
#Poling TIM for data
if ChannelID == 1
UART_send(TIMID,Channel1,'721')
SampleData = UART_Rec(TIMID,Channel1);
elif ChannelID == 2
UART_send(TIMID,Channel2,'721')
SampleData = UART_Rec(TIMID,Channel2);
reply = '0,' + ServerID +',' TIMID + ',' + ChannelID + ',' SampleData
xmpp_send(ClientID,reply)
else
reply = '1,' + ServerID
xmpp_send(ClientID,reply)
#End
The process in which the client/servers read and write from the TEDs of the transducer.
def Server_main
msg = Parse(rawmsg,',', ';')
if msg[0] == ’ 732 ’
ReadTransducerChannelTEDServices()
elif msg[0] == ’ 7312 ’
ReadWriteTransducerChannelTEDSServices()
def ReadTransducerChannelTEDSservices
if msg[1] == ServerID
TIMID = msg[2]
ChannelID = msg[3]
Timeout = msg[4]
#Message to be sent to the TIm
TimMSG = '732,' + ChannelID
#Sending request to TIM
UART_send(timId,ChannelId,TimMSG)
TEDS1 = UART_Rec(TIMId,ChannelId) # Receives the TED information
reply = '0,' +TEDS1
xmpp_send(ClientID,reply)
else
reply = '1,' + ServerID
xmpp_send(ClientID,reply)
The process in which a client is alerted by a server that a new TIM has been connected/ disconnected to the network. The client is then alerted when a sensor alert has occurred.
def Server_main
msg = Parse(rawmsg,',', ';')
if msg[0] == '743'
SubscribeSensorAlert(msg)
# Client Subscribes to a Sensor Alerts-----------------
def ReadTransducerSampleDataFromAChannelofTIM(msg):
if msg[1] == ServerID
TIMID = msg[2]
ChannelID= msg[3]
Threshold = msg[4]
Subscriber = msg[5]
SubscriptionID = 1;
reply = '0,' + ServerID +',' SubscriptionID
xmpp_send(ClientID,reply)
#-----------------END------------------------------
def NotifySensorAlert:
Alert = UART_Rec(TIMID,)
TIMAlert = Parse(Alert',', ';')
Data = TIMAlert[0]
AlertType = TIMAlert[1]
reply = '0,' + ServerID +',' TIMID + ',' + ChannelID + ',' + Data + ',' + Subscriber+ ',' + SubscriptionID +',' + AlertType
xmpp_send(Subscriber,reply)
#-----------------END--------------------------------
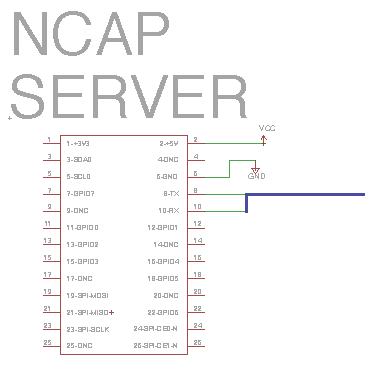
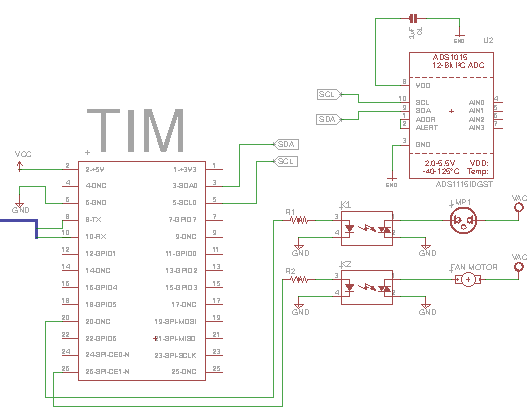
Raspberry Pi’s were used to emulate the client, server, and TIM using the Raspian operating system and the internal Idle python compiler. A sensor was connected to a TIM; this sensor was used to measure room temperature; this data was sent to the client through the server. The TIM also had a fan and a light attached to it as well, to serve as model actuators. The fan and light could be controlled by the client. The client would send a request to the sever to turn the fan or light on or off. The server will then communicate with the TIM by using UART.
An android application written in Java to be used as the client side of the smart sensor network model and communicated between the client and server with XMPP commands to request transducer information or control.
The Android XMPPconnection library, Smack, was used throughout the application to connect to the server and send and receive messages. The library allows you to specify the XMPP server, the port we are communicating on, and gives presence of who else is connected to the server
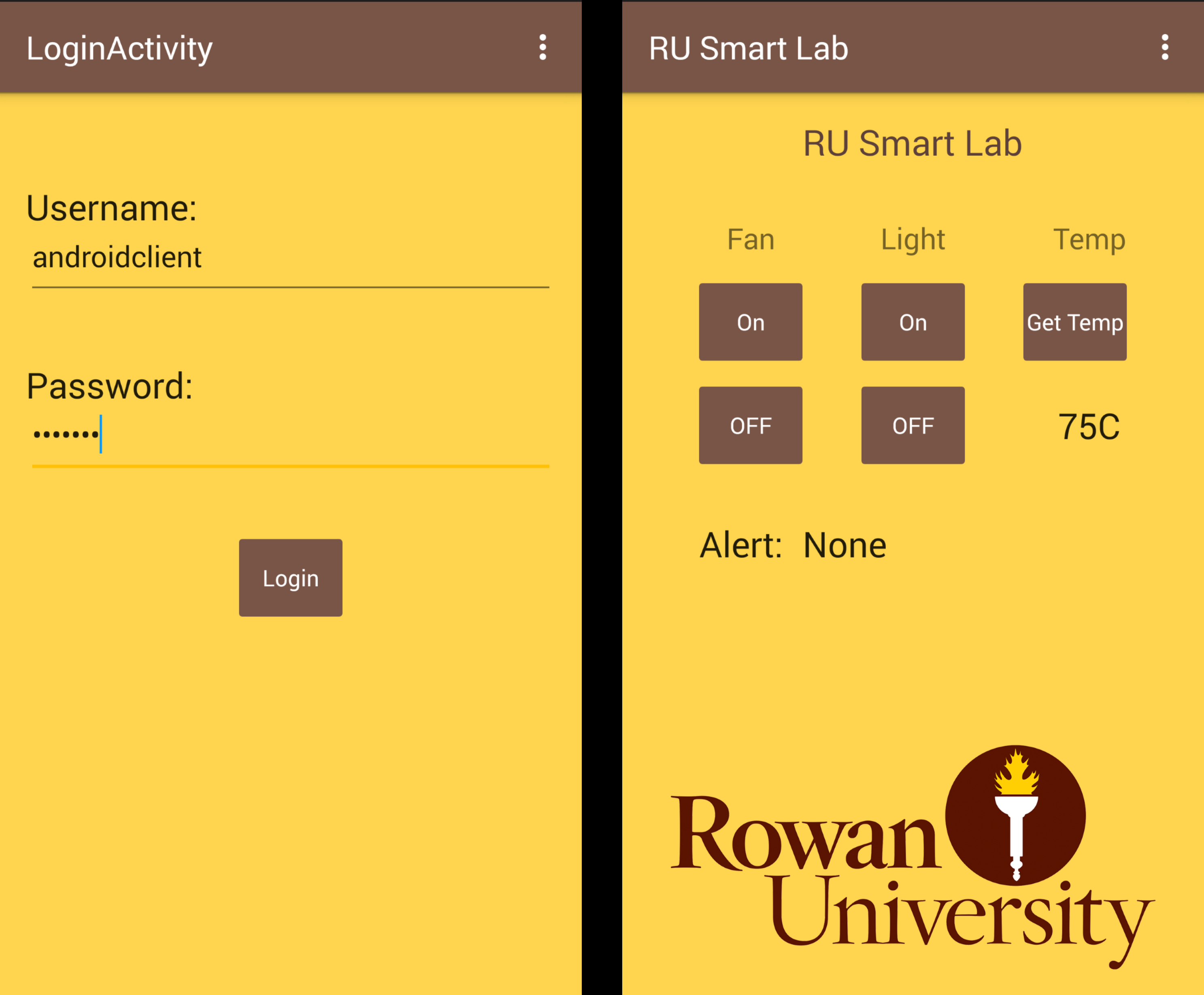
The Android GUI allows the user to issue commands via XMPP to the NCAP server. The commands, which are in the standardized message structure, are sent to the XMPP server. The NCAP server is listening to the message log on the XMPP server and parses each command, and sends the proper
Thanks for reading! If you enjoyed that or are looking for more check out the three poster presentations by clicking on the red icon on the bottom left.